【案例】多可移动协作机器人应用于生物实验室环境采样
在生物医药领域,机器人凭借其先进的技术和独特的设计,能够克服传统采样方法所面临的种种困难。机器人可以通过自主导航和避障系统安全地到达采样地点,并利用各种采样工具和设备进行样本采集。不仅能够提高采样效率和质量,还能够降低研究成本和风险,为科学家们提供更加准确、可靠的生物环境样本数据。
项目应用背景
客户是一家科技型药物生产环境微生物控制实验室,该客户希望通过引入机器人实现环境监测和消毒灭菌的智能化、无人化,通过保障环境的洁净程度,保护和提升人员与药品安全降低人员工作负荷。
客户痛点
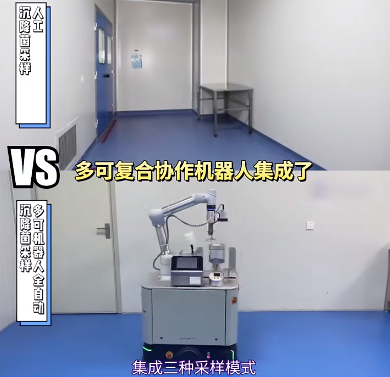
环境样本采样一致性不高: 以往人工采样,采样时间、人为环境干扰均无法保证高度一致性;
人员劳动强度大:人工采样需要携带浮游菌采样器尘埃粒子计数器及培养皿在各个采样区域频繁移动,工作重复性高。
解决方案
通过引入中科新松多可HC-X4-B-GCR5移动协作机器人,将浮游菌采样器、尘埃粒子计数器及培养皿与移动协作机器人集成,配合夹爪和视觉系统,实现机器人往返于各采样区域,并通过夹爪实现培养皿取放、操作浮游菌采样器、尘埃粒子计数器从而实现沉隆菌采样、浮游菌采样和尘埃粒子数检测功能全程自动化。根据检测结果,可与消毒设备自动通讯,完成后续消毒工作。
实际收益
提升采样过程一致性
采样过程无人工干预,根据采样位置及采样时间,全自动完成采样。
降低人员劳动强度
人工仅完成机器人携带培养皿更换即可,机器人前往采样区域进行采样。
样本质量追溯
采样过程实时数据记录,实现对每次采样的,为质量控制和后续分析提供了重要数据支持。


微信公众号

微信视频号
敏于客户需求洞察,精于应用场景探索,笃于自主求索创新
致力于为客户提供最佳解决方案,实现人机和谐的未来
![]()
企业邮箱:Marketing@ducorobots.com
全球运营总部:上海市浦东新区金沪路358弄4号楼
业务咨询热线:400-088-5288
合规邮箱:Report@ducorobots.com








