


常见问题
怎么让机器人开机自动上电,自动打开指定程序
|
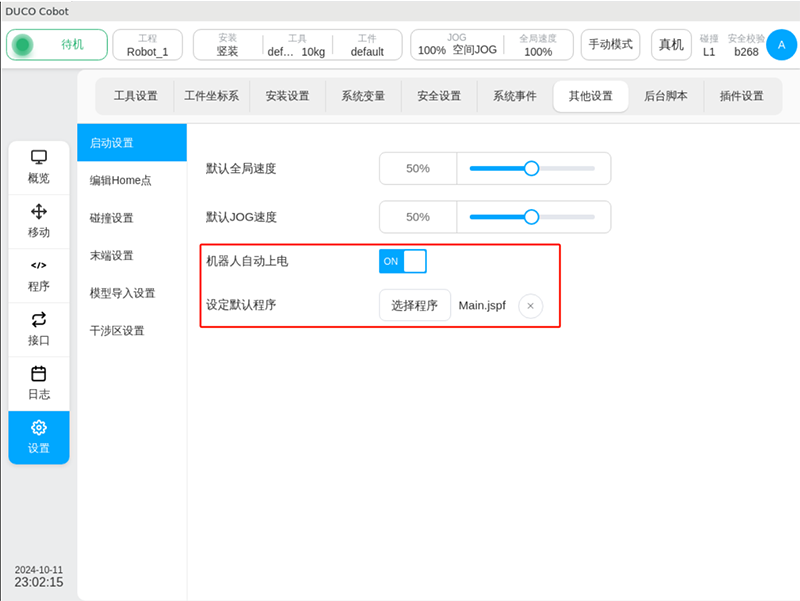
示教器中打开设置页面——其他设置——启动设置
如图启动机器人自动上电选项 点击选择程序,选择需要开机自启的程序
|
为什么机器人全局速度100%了,运行程序还是很慢?
|
操作模式为“手动模式”,机器人不会全速运行,需要切换“自动模式”,示教器右上角点击“手动模式/自动模式”进行操作模式切换,或配置外部IO模式切换后使用钥匙切换。
|

为什么set赋值无法给寄存器赋值
|
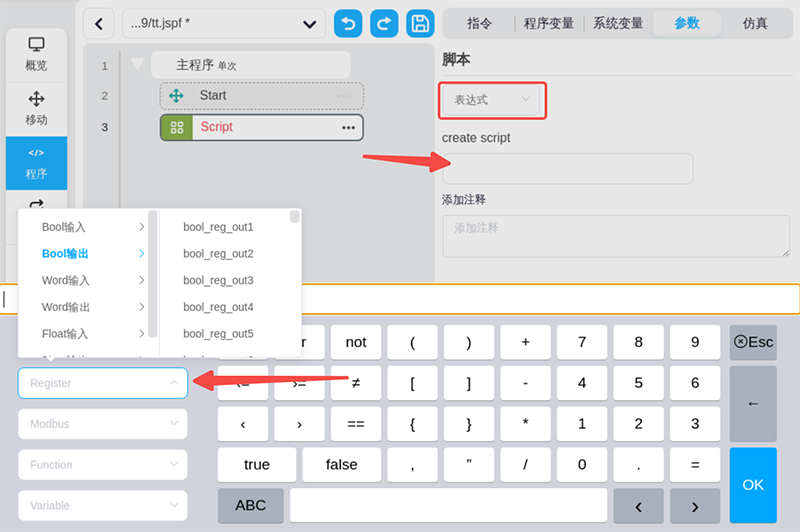
“set”指令只能给IO或变量赋值,需要修改寄存器参数使用“脚本”指令。选择表达式可快捷输入,选择需要的类型、参数。
|

程序文件无法删除
|
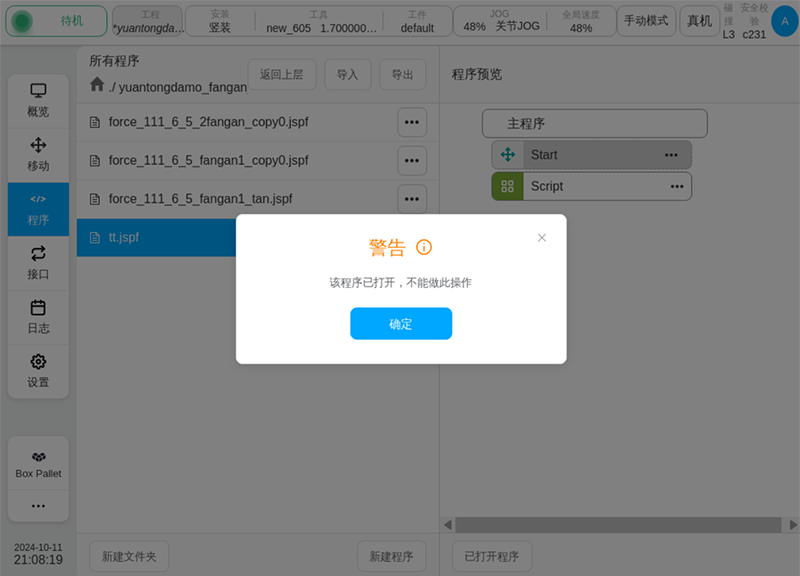
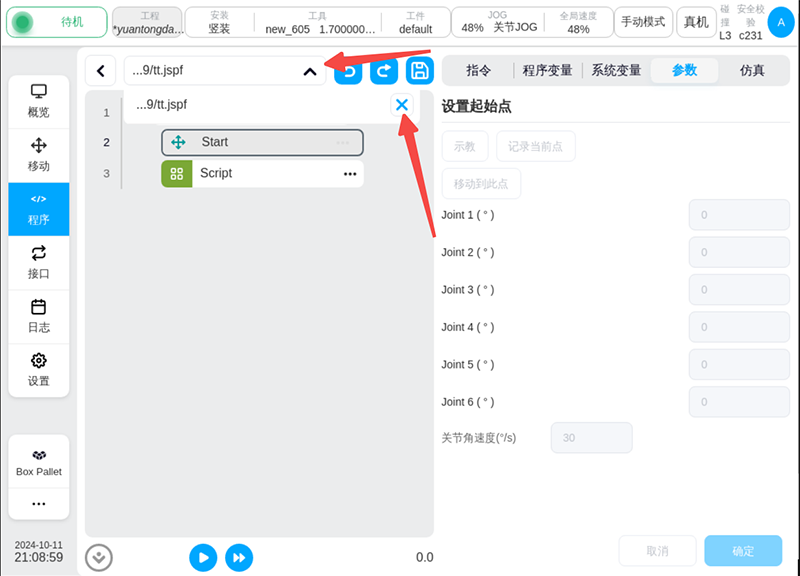
程序文件已经打开,未关闭程序操作页面。1、打开程序。2、点击程序上方显示程序名的框,就看到已经打开的程序文件,点叉叉关闭程序。
|
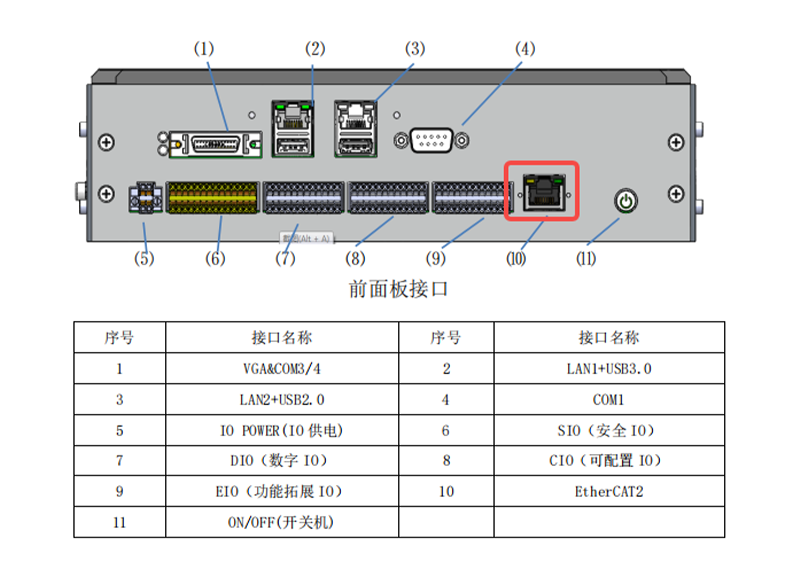
力控传感器与机器人走EtherCat通讯,网线接哪个口
|
1、网线直插控制器的EtherCat接口。
2、末端EtherCat接口
|
机器人支持的通讯方式有几种
|
1、Socket,TCP/IP,自由协议。
2、总线通讯:ModBus/TCP。 3、总线通讯:Profinet。 4、总线通讯:Etheret/IP。 5、IO通讯,16入16出。 |
DUCO(多可)机器人开机后的账号是多少呢?
|
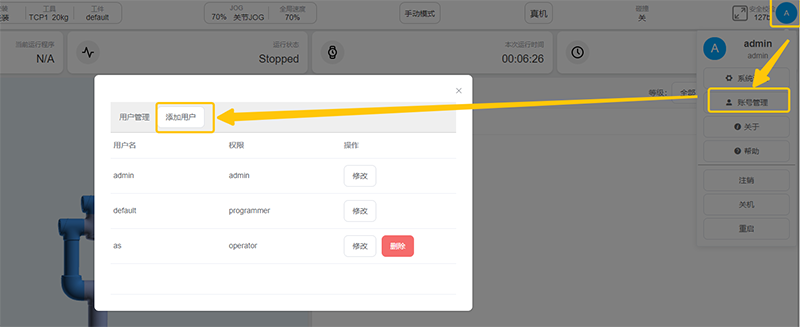
账号:admin 密码:123 (最高管理员权限,出厂默认,可更改密码,不可改账号)
账号:default 密码:123 (程序员权限,出厂默认,可更改密码,不可改账号) 自定义账号权限:admin账号登录,点击右上角的A,在点账号管理添加
|
DUCO(多可)机器人ip地址如何修改?
| 旧版本:1、admin账号登录,点右上角A,点系统设置,点网络设置,修改ip,关闭弹窗,保存工程。关机重启 |
| 新版本:1、admin账号登录,点右上角A,点系统设置,点网络设置,回跳转到管理中心界面 |

DUCO(多可)机器人可以不要示教器运行嘛?
|
可以。将示教器拔掉,并且将控制柜后面端子12短接,34短接,56短接,78短接
|





