


常见问题
DUCO(多可)机器人如何使用光栅?
|
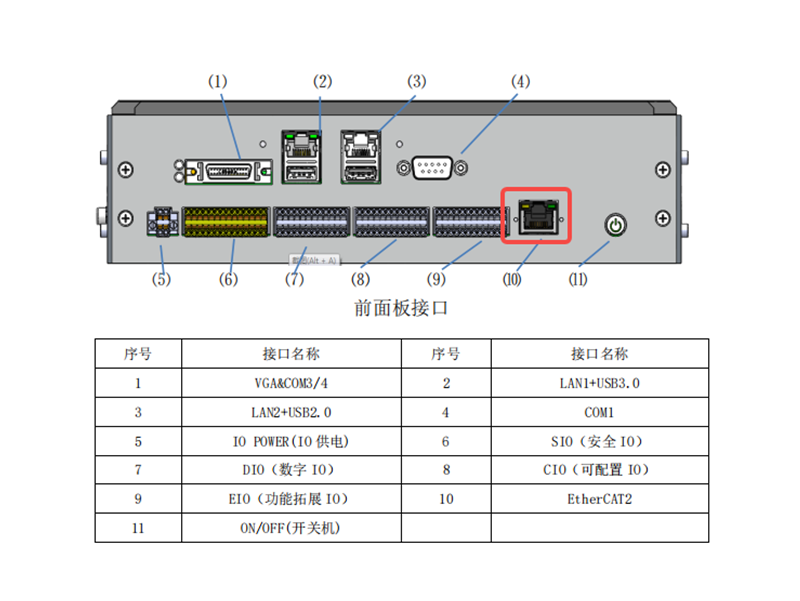
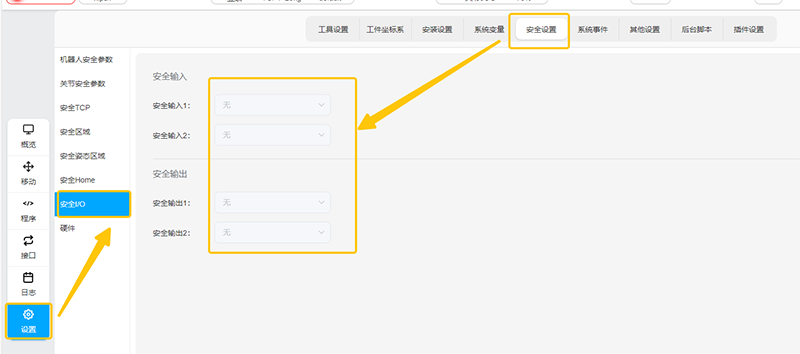
使用PNP型号光栅接入到控制柜安全io上,在机器人下电下使能--设置,安全设置,解锁,左下角点解锁密码123。选择安全IO,进行2路io ,应用此设置,重新上电。
|
DUCO(多可)机器人寄存器脚本指令如何使用?

DUCO(多可)机器人脚本使用哪种语言?
| 使用LUA语言,单位使用国际单位制度,适用LUA自有的函数 |
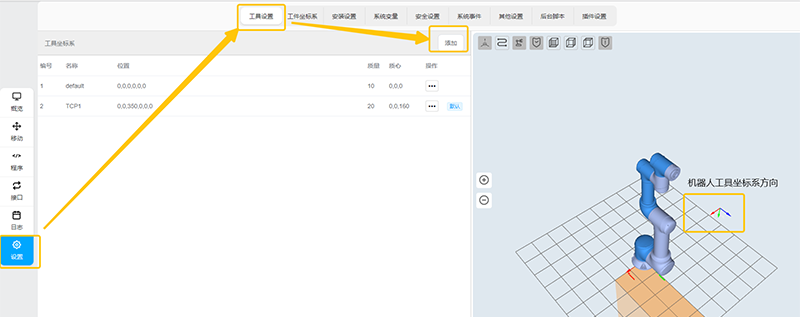
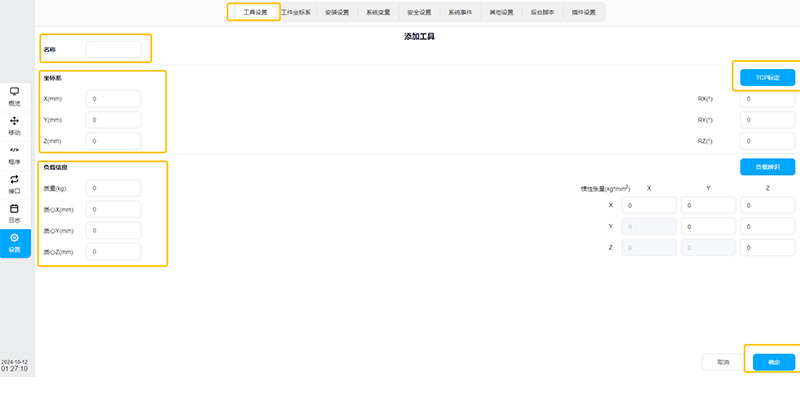
DUCO(多可)机器人如何设置工具坐标系?
|
设置--工具设置--添加。可以使用4、6点法标定,确定工装尺寸,也可以直接写,注意方向
|
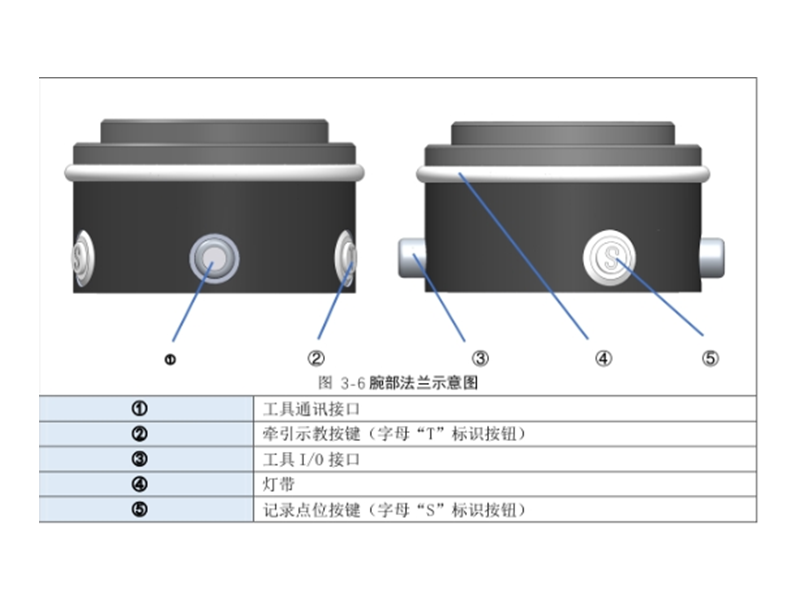
DUCO(多可)机器人如何牵引,拖拽?
|
开启末端功能按钮,2按住末端按钮 T 大约2秒,末端等待会变成绿闪状态后,就可以牵引
|
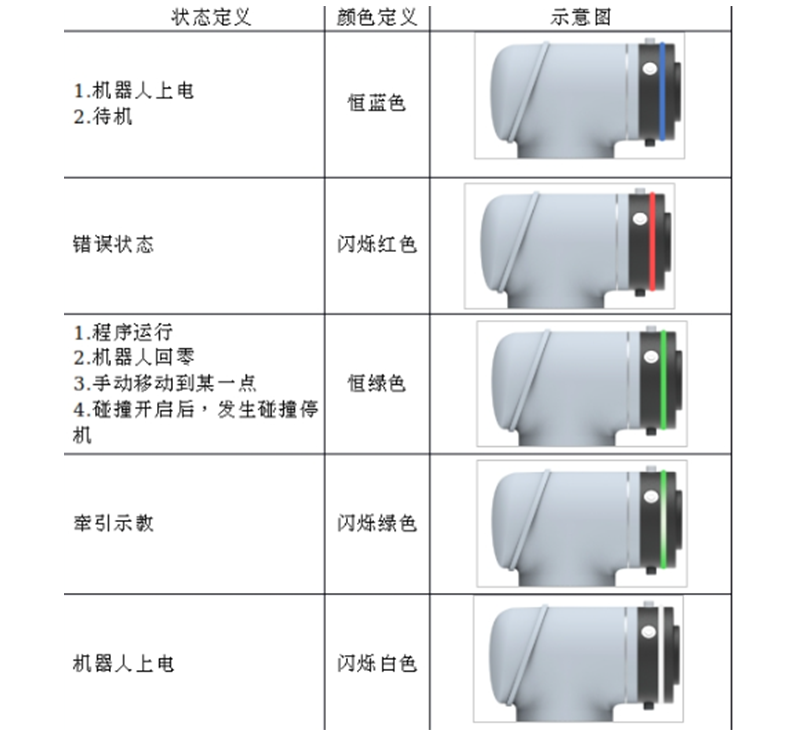
DUCO(多可)机器人末端等待颜色代表啥意思?
| 见图片 |
DUCO(多可)机器人末端灯带可以关闭嘛?
| 可以,断开末端内部连接线即可。 |
DUCO(多可)机器人功率有多大呢?
| 负载3kg--30kg待机工况状态下200w-600w,运行状态下跟机器人运行速度,负载有关系。 |
机器人通讯标准接口
| Linux 版本(当前最新版本):TCP/IP,MODBUS/TCP,Profinet,EtherCAT,CAN,RS485Windows版本(最早期版本):标配TCP/IP ,MODBUS TCP; |




